
Introduzione e concetti base
Il cammino, così per come lo conosciamo come atto motorio, è la forma di locomozione che distingue l’essere umano dal resto degli animali. Si tratta più in generale di uno schema motorio di base, ovvero un elemento costitutivo della motricità umana che autonomamente ogni essere umano raggiunge per una naturale spinta ontogenetica e per una naturale concatenazione di schemi posturali. Se ci si ferma a ragionare è palese come nessuno insegni a camminare ad un suo simile, lo si fa e basta! Senza dubbio le esperienze di vita, l’ambiente, il vissuto, la cultura, la personalità, il carattere e tantissimi altri fattori influenzano il cammino di ogni individuo e la sua strutturazione in schemi di movimento più o meno precisi, più o meno economici, più o meno corretti da un punto di vista biomeccanico.
Quando si parla di cammino, ma più in senso lato quando si parla di abilità motorie e schemi di movimento complessi ed automatici, non si deve mai scordare un principio fondamentale: il corpo umano tende costantemente al risparmio di energia cercando la forma meno dispendiosa di movimento e puntando su un misto di biomeccanica, confort ed economia (quello che in gergo viene chiamato ergonomia).
A prescindere da questi aspetti brevemente accennati è un gravissimo errore che porta ad una visione parziale della complessa realtà della deambulazione.
Meccanica base del cammino
Da un punto di vista di studio funzionale del soggetto il cammino può essere interpretato come il modo attraverso cui ogni soggetto mette in movimento le proprie catene muscolari e con esse le tensioni o le debolezze presenti. Per questa ragione ogni soggetto può sviluppare nel tempo una serie di apprendimenti ed adattamenti atti a compensare i propri squilibri muscolo-scheletrici.
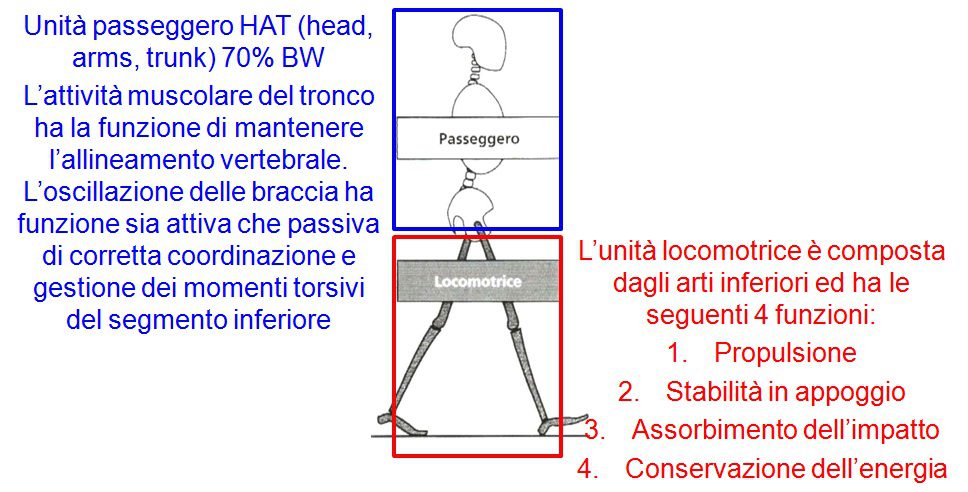
Il cammino coinvolge tutto il corpo che didatticamente viene suddiviso in una Unità passeggero ed in una Unità Locomotrice (Perry, 1992). Entrambe queste entità funzionali hanno compiti ben specifici e come ci mostra la letteratura sono frutto di una lunga evoluzione (Thompson et al., 2015).
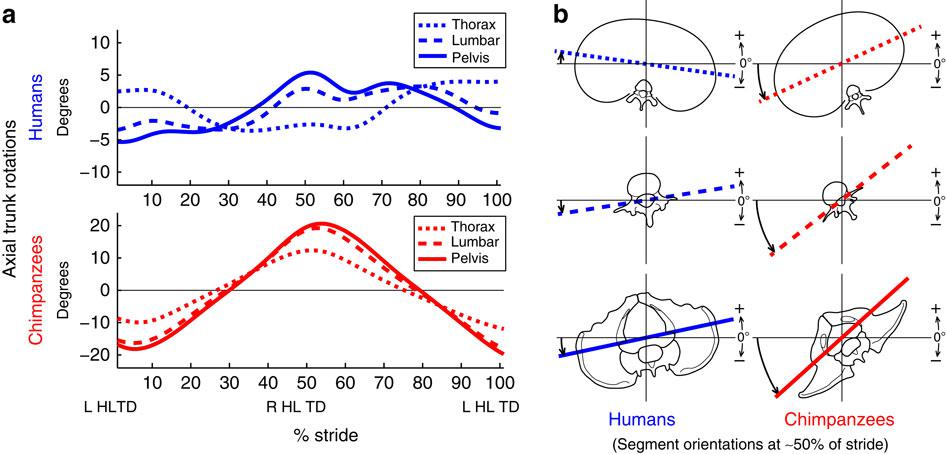
Nell’interessantissimo articolo di Thompson et al. pubblicato su Nature (2015), in cui si mostrano le differenze del cammino tra esseri umani e chimpanzee, vengono correttamente ricordati degli elementi della deambulazione noti da ormai molto tempo ma che spesso vengono dimenticati:
-
La rotazione pelvica consente una maggiore lunghezza di passo (Murray et al., 1964; Nottrodt et al., 1982; Wagenaar et al., 1992; van Emmerik et al., 1996)
-
La controrotazione del tronco rispetto alla zona pelvica riduce il momento angolare del tronco (Stokes et al., 1989; Crosbie et al., 1997; Herr et al., 2008)
-
Il movimento intrinseco del tronco facilita l’oscillazione delle braccia opposta rispetto alle gambe, cosa questa che riduce ulteriormente il momento angolare (Elftman, 1939; Herr et al., 2008; Brujin et al., 2008)
-
L’utilizzo di strategie di riduzione del momento angolare consente agli esseri umani di ridurre il lavoro muscolare (Herr et al., 2008) e soprattutto il costo energetico della locomozione (Ortega et al., 2008; Umberger, 2008; Collins et al., 2009). Il cammino in questa maniera risulta più economico e nuovamente si ha la dimostrazione di come il corpo umano tenda a mettere in atto delle strategie per massimizzare il risparmio, cosa questa correlata sotto un certo punto di vista anche con le rigidità muscolari.
-
Classicamente si ritiene che l’abilità ad utilizzare dei movimenti di rotazione dipenda principalmente dal fatto che gli esseri umani hanno tendenzialmente un tronco lungo ed una vita stretta (Keith, 1923; Schmid et al., 1994; Wood et al., 1999; Bramble et al., 2004), cosa questa che facilita quindi i movimenti di rotazione e controrotazione della gabbia toracica e del bacino
Il suddetto articolo di Thompson (2015) mette in evidenza come durante il cammino sia presente una differenza in termini di range of motion di tutti i segmenti del tronco a favore delle donne in confronto agli uomini, ma soprattutto evidenzia come l’evoluzione della specie abbia portato ad un miglioramento delle strategie di movimento attraverso la controrotazione della parte superiore rispetto a quella inferiore del corpo umano nella locomozione, riducendo i range of motion assoluti che negli chimpanzee sono molto più marcati sia per la zona pelvica-lombare che per la gabbia toracia. L’essere umano rispetto allo chimpanzee ha un movimento in controfase tra il bacino e la gabbia toracica, a differenza dello chimpanzee che ha un movimento in fase (controfase = rotazione in direzione opposta; in fase = rotazione nella stessa direzione) ma la cosa più importante è che mantenendo fisso il bacino e calcolando il movimento relativo della gabbia toracica su di esso il quantitativo di movimento relativo non è così differente tra le due specie.
Come a dire che l’essere umano è destinato a camminare in posizione bipodalica e lo sviluppo della specie lo ha portato ad ottimizzarsi.
Da un punto di vista meccanico, invece, il cammino si attua attraverso una alternanza di appoggi monopodalici intervallati da momenti di doppio appoggio podalico.
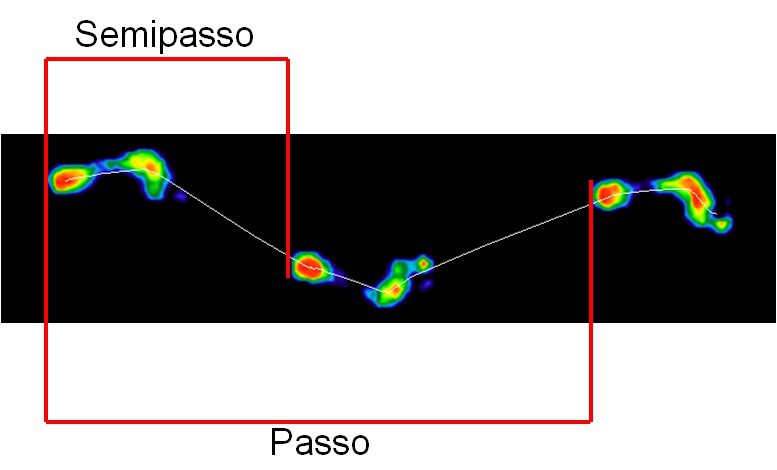
Il semipasso si definisce come la distanza orizzontale tra il tallone del piede più arretrato e quello del piede più avanzato, mentre il passo come la distanza orizzontale tra la posizione del tallone al momento dell’appoggio precedente e poi al momento dell’appoggio successivo sempre dello stesso piede.
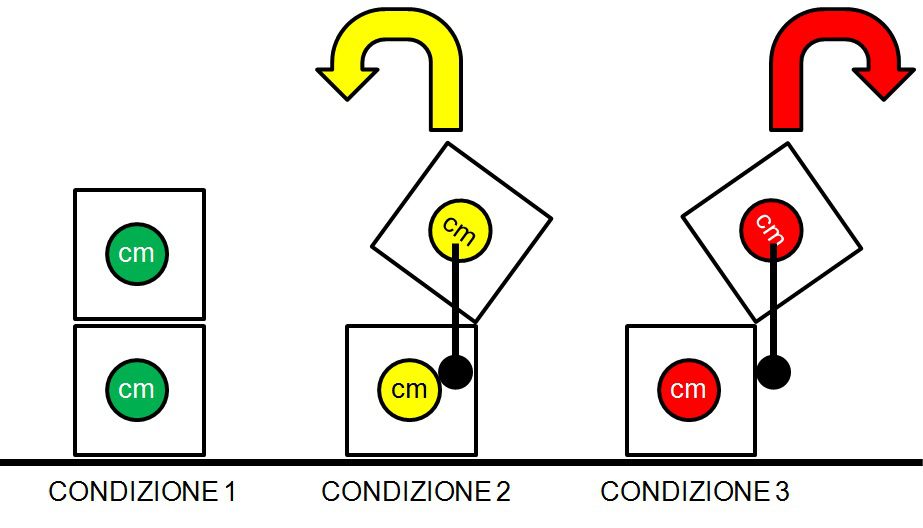
Per compiere un semipasso e quindi per avviare il processo di deambulazione risulta fondamentale perdere la propria condizione di equilibrio eretto statico a favore di uno sbilanciamento anteriore tale che l’unica azione che si può compiere è quella di proiettare avanti un arto inferiore per portarlo in appoggio avanzando rispetto al punto di partenza. In posizione eretta la proiezione al suolo del centro di massa del nostro corpo cade esattamente all’interno della base di appoggio (CONDIZIONE 1); possiamo sbilanciarci avanti e poi tornare al punto di partenza senza cadere fintanto che la proiezione al suolo del centro di massa resta all’interno della base di appoggio (CONDIZIONE 2); quando poi però la catena muscolare statica posteriore si rilascia permettendo alle forze ribaltanti di farci andare verso l’avanti e la proiezione al suolo del centro di massa esce fuori dalla base di appoggio a quel punto l’equilibrio viene perso, non c’è possibilità di tornare indietro e l’unica modalità per riacquistarlo è quella di portare avanti un piede ed assecondare questo spostamento anteriore del centro di massa avanzando e portando più avanti la base di appoggio (CONDIZIONE 3). In questi termini il cammino quindi altro non è che una continua perdita di equilibrio.
Fasi del cammino e relativa interpretazione muscolare
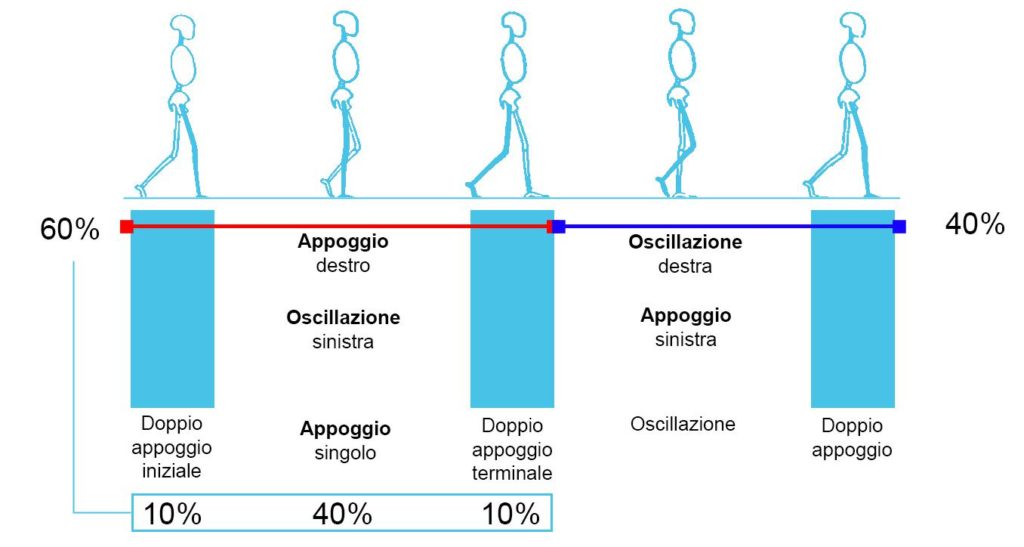
Attraverso la perdita dell’equilibrio e il successivo recupero e gestione dello stesso si mette in atto una corretta ed ordinata sequenza di movimento che prevede fasi di appoggio e di oscillazione del piede e dell’arto inferiore in genere. La fase di appoggio è sempre seguita da una fase di oscillazione e in entrambi i momenti possono essere presenti aspetti caratteristici da osservare. La durata delle due fasi è diversa e variabile ma può essere descritta in forma generica come nel grafico proposto da Perry (1992) e modificato:
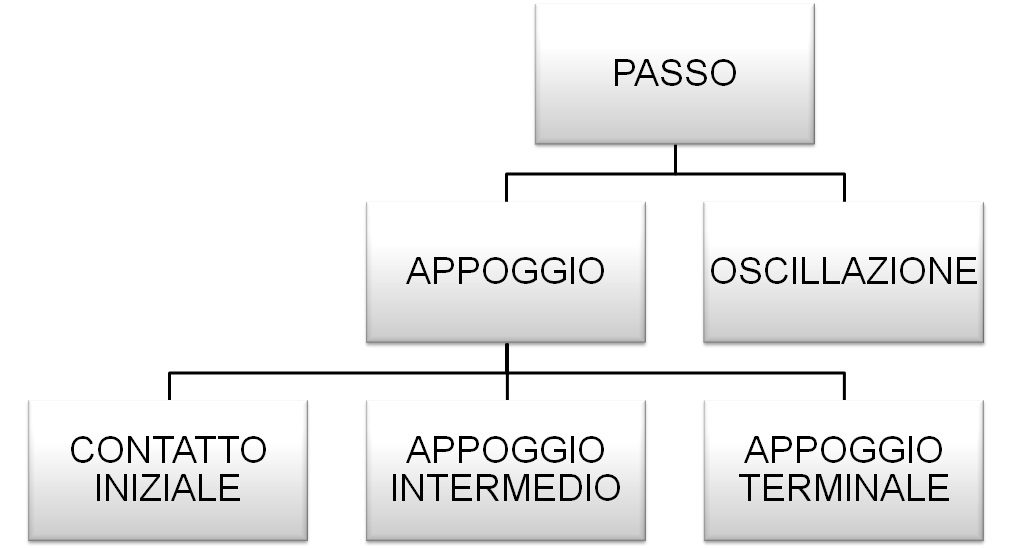
Le singole fasi descritte nell’immagine precedente si possono quindi ulteriormente distinguere in forma macroscopica secondo lo schema seguente:
Durante il cammino il piede si comporta quindi in due maniere completamente differenti ma funzionali l’una alla successiva: in una prima fase di appoggio podalico, anche detta fase filogravitaria, sarà prevalentemente un “organo di senso” mentre in successiva fase di spinta, anche detta fase antigravitaria, sarà prevalentemente un “organo di moto” (Paparella Treccia, 1978).
Appare chiaro che la fase di appoggio riveste un ruolo determinante nella valutazione del passo, essendo di fatto la fase che prevede la gestione del peso del soggetto sia a favore che contro la gravità terrestre. A questo punto risulta semplice intuire che la maggior durata della fase di appoggio rispetto alla fase di oscillazione sia una cosa del tutto naturale a causa di fattori meccanici quali l’attrito al suolo e a causa di fattori neuro-fisiologici quali la ricerca di stabilità, la propriocezione e l’equilibrio richiesti nella fase di singolo appoggio.
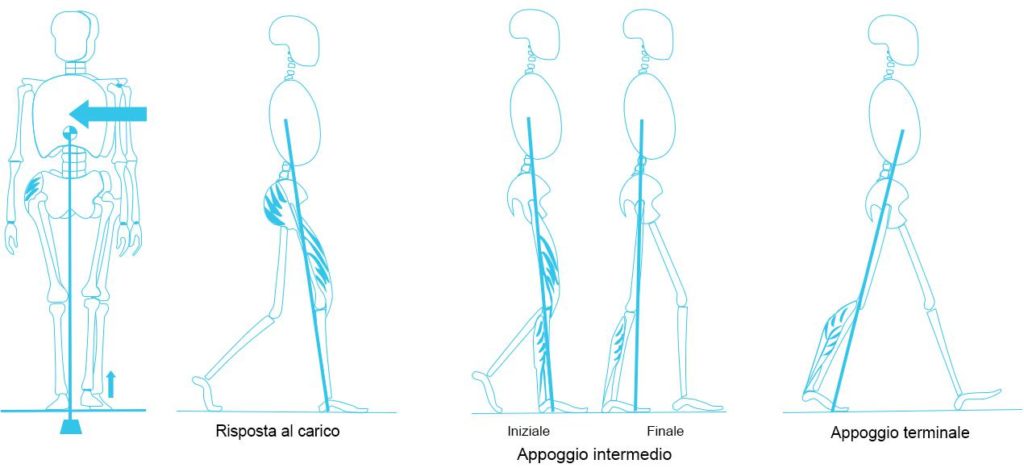
Andando ad esplorare maggiormente le fasi individuate precedentemente e entrando ancor più nel dettaglio del cammino, appare molto utile lo schema di seguito riportato e le relative informazioni fornire da Perry (1992):
|
FASE GENERALE |
FASE SPECIFICA |
POSIZIONE ARTICOLARE |
MUSCOLI COINVOLTI |
|
ACCETTAZIONE DEL CARICO |
Fase 1 Contatto Iniziale (IC – Initial Contact) 0-2% |
Arto inferiore disteso per iniziare l’appoggio con la porzione postero-esterna del calcagno. Tibiotarsica in lieve flessione dorsale e piede in supinazione, ginocchio esteso, anca piegata. |
|
|
Note della fase di Contatto Iniziale In questo istante il corpo è in caduta libera verso il terreno poiché il centro di massa è stato spinto oltre la base di appoggio; questo porta ad un brusco impatto del tallone a terra che in 2 centesimi di secondo assorbe il 60% del peso corporeo. Appena dopo l’atterraggio del tallone è la porzione anteriore del piede che rapidamente va a terra frenata dal tibiale anteriore. |
|||
|
Fase 2 Risposta al Carico (LR – Load Response) 0-10% |
Appoggio completo del piede, tibiotarsica che si muove verso la posizione neutra, anca e ginocchio piegati. |
|
|
|
Note della fase di Risposta al Carico Assorbimento dell’impatto con il controllo del piegamento del ginocchio e della tibiotarsica, mantenimento della stabilità sotto carico attraverso la stabilizzazione dell’anca, i cui muscoli abduttori sostengono in media 1,5 il peso del corpo. Le rotazioni sul piano trasverso dipendono prevalentemente dal movimento del calcagno la cui posizione influenza marcatamente l’alternanza dei movimenti di pronazione e di supinazione del piede. |
|||
|
APPOGGIO SINGOLO |
Fase 3 Appoggio Intermedio (Mst – Mid stance) 10-30% |
Appoggio completo del piede, tibiotarsica da neutra a dorsiflessa (in catena cinetica chiusa), ginocchio disteso. |
|
|
Note della fase di Appoggio Intermedio Progressione del piede in appoggio attraverso il controllo della distensione del ginocchio e del piegamento della tibiotarsica, stabilizzazione di arto e tronco. |
|||
|
Fase 4 Appoggio Terminale (Tst – Terminal stance) 30-50% |
Tibiotarsica che passa gradualmente dalla posizione di dorsiflessione verso quella di flessione plantare, ginocchio e anca distesi. |
|
|
|
Note della fase di Appoggio Terminale Progressione del piede oltre il piede in appoggio attraverso il sollevamento del tallone e la caduta libera del peso del corpo verso avanti. |
|||
|
AVANZAMENTO DELL’ARTO |
Fase 5 Preoscillazione (PSw – Pre swing) 50-60% |
Posizionamento arto per l’oscillazione e il trasferimento del carico attraverso l’avanzamento dell’arto con flessione del ginocchio, flessione plantare e anca neutra. |
|
|
Note della fase di Preoscillazione Il piede si prepara allo stacco da terra con una spinta finale che dovrebbe essere offerta dall’alluce, deviazioni assiali di quest’ultimo ne limitano la funzione e la spinta risulta così alterata e con modesta efficacia. In questo momento si ha una fase di doppio appoggio podalico sul piano sagittale: una fase molto delicata e studiata soprattutto nei soggetti a rischio di cadute. |
|||
|
Fase 6 Oscillazione Iniziale (ISw – Initial swing) 60-73% |
Anca e ginocchio flessi e tibiotarsica leggermente in flessione plantare in ritorno verso la posizione neutra. |
|
|
|
Note della fase di Oscillazione Iniziale Sollevamento del piede dal suolo e avanzamento dell’arto attraverso la flessione del ginocchio e dell’anca. |
|||
|
Fase 7 Oscillazione Intermedia (MSw – Mid swing) 73-87% |
Anca flessa, ginocchio che passa dalla posizione di flessione verso quella di estensione e tibiotarsica in posizione neutra. |
|
|
|
Note della fase di Oscillazione Intermedia Avanzamento dell’arto e sollevamento del piede dal suolo attraverso la dorsiflessione della tibiotarsica e la flessione dell’anca, la tibia è perpendicolare a suolo. |
|||
|
Fase 8 Oscillazione Terminale (TSw – Terminal swing) 87-100% |
Anca flessa, ginocchio esteso e tibiotarsica in posizione neutra in passaggio verso una posizione di lieve flessione dorsale e supinazione per un corretto approccio al terreno. |
Attivazione intensa per prepararsi alla nuova accettazione del carico |
|
|
Note della fase di Oscillazione Terminale Completamento dell’avanzamento dell’arto e preparazione al contatto con il suolo, la gamba deve trovarsi davanti alla coscia attraverso l’estensione del ginocchio. Anca e ginocchio decelerano il loro moto preparandosi così al successivo impatto. |
|||
Appoggio monopodalico e catene muscolari di apertura e chiusura
Dalla tabella sopra ci si rende conto di quanto il passo sia impegnativo per il corpo umano e quindi del perché il corpo è obbligato alla ricerca di meccanismi di compenso e risparmio.
Di tutte le fasi del passo, ognuna specifica e peculiare per ogni sua caratteristica, merita una breve riflessione a parte la fase di Appoggio Intermedio. Appare chiaro che questa fase è sicuramente molto influenzata da come il piede poggia terra: un appoggio in eccesso di supinazione oppure in pronazione predispone sicuramente una cattiva gestione dell’Appoggio Intermedio. Oltre a questi aspetti però la fase di Appoggio Intermedio ha una caratteristica peculiare rispetto alle altre: è l’unica fase del passo in cui tutto il corpo è sorretto da un solo piede, ovvero in cui ci si trova in equilibrio monopodalico. Questa fase dura per poco tempo in media ma viene ripetuta per un gran numero di volte durante la giornata, un esempio con numeri reali potrebbe aiutarci a capire meglio l’entità del fenomeno: immaginiamo che la nostra fase di Appoggio Intermedio abbia una durata media di 250ms e che nella giornata si compia un totale di 5000 appoggi al suolo, al termine della giornata avremo compiuto oltre 15 minuti di appoggi monopodalici.
Durante una fase di appoggio al suolo monopodalico la stabilità è assicurata dai muscoli dell’anca dell’arto in appoggio e dalle coppie di muscoli che gestiscono antero-posteriormente le articolazioni dell’arto di appoggio, che hanno lo scopo di assecondare i cambiamenti di direzione della forza di reazione del suolo e di gestire l’accomodamento alla forza di gravità. L’attivazione dei muscoli laterali dell’anca, in special modo il medio gluteo e il tensore della fascia lata è coadiuvata dall’azione del muscolo quadrato dei lombi controlaterale, mentre è inibita dall’attivazione della muscolatura adduttoria omolaterale. Queste coppie di forza creano quindi delle situazioni per cui una maggiore attivazione della catena muscolare di chiusura (quindi con un coinvolgimento del comparto adduttorio della coscia) imponga un maggior lavoro muscolare della bassa schiena, mentre una maggiore attivazione della catena muscolare di apertura (quindi con un coinvolgimento del comparto abduttorio della coscia) imponga una meccanica svantaggiosa per la zona lombare e per il ginocchio.
Nelle due animazioni che seguono si può notare in vista frontale quanto sia importante la corretta gestione della posizione monopodalica. L’immagine della donna denota come una mancanza di tenuta dei muscoli stabilizzatori dell’anca imponga al bacino un lavoro eccessivo sul piano frontale in termini di basculamento supero-inferiore e spostamento latero-laterale (con connessa iperestensione delle ginocchia), mentre l’immagine dell’uomo mostra come una eccessiva rigidità del complesso del bacino vada a creare degli inevitabili compensi sulla zona superiore con una eccessiva oscillazione laterale del busto e delle braccia.
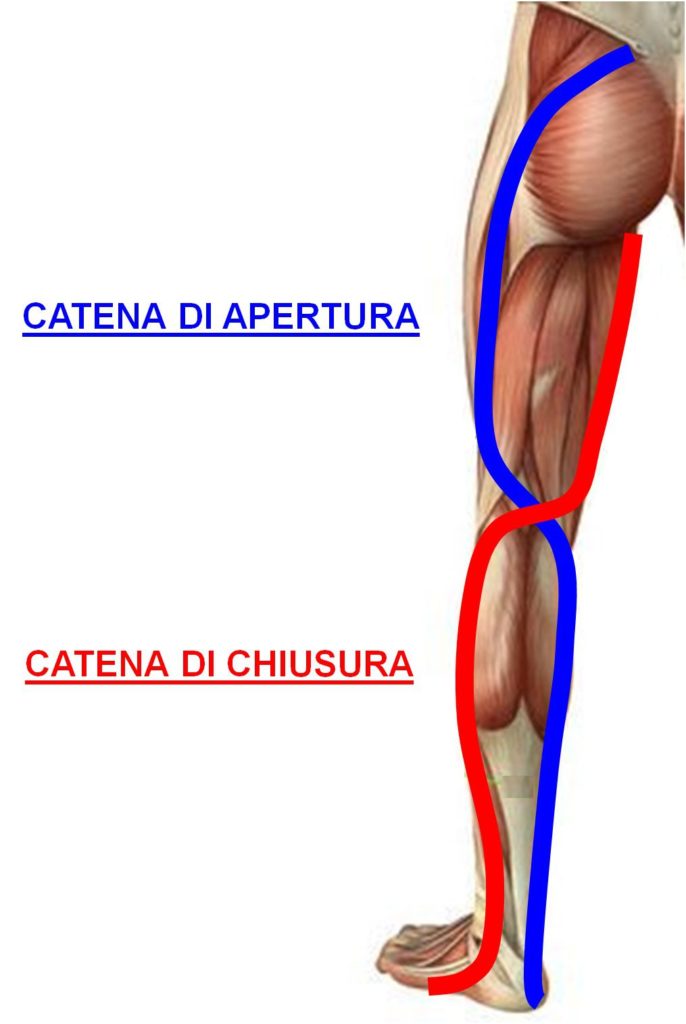
In questo contesto si possono quindi introdurre le così dette catene muscolari di apertura e di chiusura. Come tutte le catene muscolari anche queste sono circuiti anatomici funzionali in cui vi è una continuità di fascia ed un passaggio preferenziale di tono ma si distinguono dalle altre per la funzione tridimensionale che hanno sulla meccanica dell’arto inferiore. Il loro decorso è spiroidale e si continua sul busto con le così dette catene muscolari crociate, il punto di incrocio delle due catene è la zona poplitea e da lì decussano in direzioni opposte.
La catena muscolare di apertura comprende muscoli abduttori ed extrarotatori della coscia e della gamba (sul piano anteriore fa parte di questa catena anche il muscolo sartorio) e muscoli “cavizzanti” del piede, mentre la catena muscolare di chiusura comprende muscoli adduttori ed intrarotatori della coscia e della gamba e muscoli “piattizzanti” del piede.
Una iperattivazione di una delle due a sfavore dell’altra comporterà un aumento di movimento e di permanenza o in atteggiamento valgo (catena di chiusura) o in atteggiamo varo (catena di apertura) durante tutte le fasi del passo.
L’articolo proseguirà nella 2° PARTE in cui verranno trattati:
- Principali modelli di cammino e gestione del rachide
- L’analisi e lo studio strumentale del cammino
- La gestione della pronazione e della supinazione durante il cammino
Bibliografia:
-
Bramble DM, Lieberman DE. Endurance running and the evolution of Homo. Nature; 2004, 432:345–352.
-
Bruijn SM, Meijer OG, van Dieën JH, Kingma I, Lamoth CJC. Coordination of leg swing, thorax rotations, and pelvis rotations during gait: the organisation of total body angular momentum. Gait Posture; 2008, 27:455–462.
-
Collins SH, Adamczyk PG, Kuo AD. Dynamic arm swinging in human walking. Proc Biol Sci; 2009, 276:3679–3688.
-
Crosbie J, Vachalathiti R, Smith R. Patterns of spinal motion during walking. Gait Posture; 1997, 5:6–12.
-
Elftman H. The function of the arms in walking. Hum Biol; 1939, 11:529–535.
-
Herr H, Popovic M. Angular momentum in human walking. J Exp Biol; 2008, 211:467–481.
-
Keith A. Hunterian lectures on man’s posture: its evolution and disorders. Lecture II: the evolution of the orthograde spine. Br Med J; 1923, 1:499–502.
-
Latour E, Latour M, Arlet J, Adach Z, Bohatyrewicz A. Gait functional assessment: spatio-temporal analysis and classification of barefoot plantar pressure in a gruop of 11-12 year-old children. Gait Posture; 2011, 34: 415-420.
-
Murray MP, Drought AB, Kory RC. Walking patterns of normal men. J Bone Joint Surg Am; 1964, 46:335–360.
-
Nottrodt JW, Charteris J, Wall JC. The effects of speed on pelvic oscillations in the horizontal plane during level walking. J Hum Mov Stud; 1982, 8:27–40.
-
Ortega JD, Fehlman LA, Farley CT. Effects of aging and arm swing on the metabolic cost of stability in human walking. J Biomech; 2008, 41:3303–3308.
-
Padulo J, Chamari K, Ardigò LP. Walking and running on treadmill: the standard criteria for kinematics studies. Muscle Ligaments Tendons J; 2014, 4(2):159-162.
-
Paparella Treccia R. Il piede dell’uomo. Verduci Editore; 1978.
-
Perry J. Gait analysis. Normal and pathological function. SLACK Incorporated; 1992.
-
Schmid P, Piaget A. Three-dimensional kinematics of bipedal locomotion. Z Morphol Anthropol; 1994, 80:79–87.
-
Stokes VP, Andersson C, Forssberg H. Rotational and translational movement features of the pelvis and thorax during adult human locomotion. J Biomech; 1989, 22:43–50.
-
Thompson NE, Demes B, O’Neill MC, Holowka NB, Larson SG. Surprising trunk rotational capabilities in chimpanzeesand implications for bipedal walking proficiency in early hominins. Nat Commun; 2015, 6:8416. doi: 10.1038/ncomms9416.
-
Umberger BR. Effects of suppressing arm swing on kinematics, kinetics, and energetics of human walking. J Biomech; 2008, 41:2575–2580.
-
van Emmerik REA, Wagenaar RC. Effects of walking velocity on relative phase dynamics in the trunk in human walking. J Biomech; 1996, 29:1175–1184 (1996).
-
Wagenaar RC, Beek WJ. Hemiplegic gait: a kinematic analysis using walking speed as a basis. J Biomech; 1992, 25:1007–1015.
-
Wood B, Collard M. The human genus. Science; 1999, 284:65–71.













